
Einleitung: Das radikalste Experiment des modernen Motorsports
Im modernen Motorsport, der zunehmend von starren technischen Reglements, homogenisierten Windkanal-Designs und kompromissloser Aerodynamik dominiert wird, grenzt echte Innovation an eine Anomalie. Nahezu jedes moderne Rennfahrzeug folgt einem etablierten Architekturmuster: vier Räder an den äußeren Ecken, eine breite Spur an der Vorder- und Hinterachse sowie eine aerodynamische Balance, die gleichermaßen auf beide Enden verteilt ist.
Im Jahr 2010 erschütterte jedoch ein Konzept die Motorsportwelt, das alle mathematischen und physikalischen Grundsätze des traditionellen Automobilbaus infrage stellte: der DeltaWing. Mit einer extrem schmalen Spur an der Vorderachse, einer breiten Hinterachse und der markanten Silhouette eines Kampfjets brach dieses Projekt radikal mit den Konventionen. Es versprach eine Halbierung des Gewichts, eine Halbierung des aerodynamischen Luftwiderstands und eine Halbierung des Kraftstoff- und Reifenverbrauchs – bei identischen Rundenzeiten im Vergleich zu traditionellen Prototypen.
Dieses radikale Experiment bildete das Fundament für eine mehrjährige Odyssee über die wichtigsten Rennstrecken der Welt. Sie führte über den legendären „Garage 56“-Innovationsplatz bei den 24 Stunden von Le Mans hin zu einem ehrgeizigen, aber von technischen Dramen überschatteten Werksprogramm mit Nissan und der Entwicklung des teilelektrischen Nissan ZEOD RC. Schließlich mündete die Reise in eine eigenständige Fortsetzung durch den amerikanischen Visionär Don Panoz im IMSA-Langstreckensport mit dem geschlossenen DeltaWing DWC13.
Es ist eine Chronik, die von genialer Ingenieurskunst, erbitterten Rechtsstreitigkeiten, bahnbrechenden Fortschritten in der additiven Fertigung und dem tragischen Scheitern im Angesicht technologischer Komplexität erzählt.
1. Die Entstehung des DeltaWing-Konzepts
Ben Bowlby und die Vision der Effizienz
Die Ursprünge des DeltaWing liegen nicht im europäischen Langstreckensport, sondern im US-amerikanischen Formelsport. Ende der 2000er-Jahre suchte die IndyCar-Serie nach einem Nachfolger für ihr in die Jahre gekommenes Dallara-Chassis. Das Ziel der Serie war es, ein spektakuläres, kostengünstiges und modernes Fahrzeug zu finden, das enge Rennen ermöglichte und gleichzeitig die Relevanz für die Automobilindustrie steigerte.
Der britische Renningenieur und Designer Ben Bowlby, der zuvor als Chefdesigner bei Chip Ganassi Racing tätig gewesen war, erkannte, dass die inkrementelle Evolution herkömmlicher Rennwagen an eine physikalische Grenze gestoßen war. Um ein Fahrzeug drastisch effizienter zu machen, musste der aerodynamische Widerstand massiv reduziert werden. Seine fundamentale Erkenntnis war so simpel wie revolutionär: Wenn man die Spur der Vorderachse extrem verjüngt und die Vorderräder dicht nebeneinander positioniert, entfällt der gigantische aerodynamische Widerstand, den freistehende oder breit ausgestellte Vorderräder und die dazugehörigen Kotflügel unweigerlich erzeugen.
Bowlby entwarf ein Fahrzeug, dessen aerodynamischer Mittelpunkt und Gewichtsverteilung extrem weit hinten lagen. Unterstützt wurde er bei der initialen Umsetzung von Chassishersteller All American Racers (AAR) des legendären Dan Gurney sowie vom visionären Motorsport-Unternehmer Don Panoz. Im Februar 2010 wurde das Konzept auf der Chicago Auto Show offiziell als potenzielles IndyCar für die Saison 2012 vorgestellt.
Die mathematische Absurdität: Das IndyCar-Projekt von 2010
Die Fachwelt reagierte mit ungläubigem Staunen und harter Skepsis. Der DeltaWing besaß keine Frontflügel im traditionellen Sinne. Stattdessen vertraute er vollständig auf den Unterboden, um Abtrieb zu generieren. Die Fachmedien und konkurrierende Ingenieure prognostizierten, dass das Auto beim Einlenken in Kurven unweigerlich geradeaus untersteuern oder sich beim Bremsen unkontrollierbar eindrehen würde.
Die mathematischen Grundlagen, die Bowlby und sein Team vorlegten, sprachen jedoch eine andere Sprache. Das gesamte Fahrzeugkonzept basierte auf einer radikalen Gewichtsverlagerung:
- Gewichtsverteilung: Etwa 72,5 % des Gesamtgewichts lasteten auf der Hinterachse, lediglich 27,5 % auf der Vorderachse.
- Masse: Das anvisierte Mindestgewicht lag bei nur 475 kg (ohne Fahrer) – fast die Hälfte eines damaligen IndyCars.
- Aerodynamik: Durch die deltaförmige Grundstruktur wurde der Luftwiderstandsbeiwert ($c_w$) drastisch gesenkt. Dies bedeutete, dass das Fahrzeug nur halb so viel Leistung wie ein konventioneller Rennwagen benötigte, um die gleiche Höchstgeschwindigkeit zu erreichen.
Trotz der faszinierenden mathematischen Parameter entschied sich das ICONIC-Komitee der IndyCar-Serie im Juli 2010 gegen Bowlbys futuristischen Entwurf und vergab den Exklusivvertrag an das traditionelle Design von Dallara (das spätere DW12-Chassis).
Umorientierung auf die Langstrecke: Der Sprung nach Le Mans
Nach der Absage der IndyCar-Verantwortlichen weigerten sich Bowlby, Gurney und Panoz, das Projekt sterben zu lassen. Sie erkannten, dass die Kernmerkmale des DeltaWing – extreme Treibstoffeffizienz und minimaler Reifenverschleiß – die perfekten Attribute für den Langstreckensport darstellten.
Der Automobile Club de l’Ouest (ACO), Veranstalter der 24 Stunden von Le Mans, hatte kurz zuvor das Konzept des „Garage 56“ ins Leben gerufen. Dieser Startplatz außerhalb der offiziellen Wertung war explizit für Fahrzeuge reserviert, die wegweisende, innovative Technologien demonstrierten. Im Juni 2011 wurde offiziell bekannt gegeben, dass der DeltaWing den Garage-56-Slot für das Rennen im Jahr 2012 erhalten würde.
Um das Projekt auf die anspruchsvolle Natur der Erdgürtel-Rennstrecke von Le Mans anzupassen, musste Bowlby das Auto von einem einsitzigen Formelwagen in einen zweisitzigen Sportwagen-Prototypen umkonstruieren. Als strukturelle Basis für den Prototyp diente ein modifiziertes Monocoque des gescheiterten Aston Martin AMR-One LMP1-Projekts. Das Kohlefaser-Chassis wurde im vorderen Bereich komplett umgestaltet, um die extrem schmale Vorderachse aufzunehmen.
2. Die technische Anatomie des DeltaWing
Um die Fahrphysik des DeltaWing zu verstehen, muss man die traditionelle Fahrdynamiklehre temporär ausblenden. Das Auto funktionierte, weil seine Konstruktion perfekt mit den Gesetzen der Trägheit und der Aerodynamik harmonierte.
Dimensionen, Spurweite und das Reifen-Dilemma
Die physischen Dimensionen des ersten Le-Mans-DeltaWing (Projektname DWC13 in seiner späteren Evolution) verdeutlichen die Asymmetrie:
- Länge: ca. 4,65 Meter
- Breite (Hinterachse): 2,00 Meter
- Breite (Vorderachse): Nur 0,60 Meter (60 Zentimeter Spurweite)
- Radstand: 2,90 Meter
Das extremste Merkmal waren zweifelsohne die Vorderräder. Da herkömmliche Rennreifen für diese Dimensionen völlig unbrauchbar waren, musste mit Michelin ein exklusiver Reifenpartner gewonnen werden. Die französischen Ingenieure entwickelten maßgeschneiderte Vorderreifen mit den bizarren Dimensionen 10/58-15. Das bedeutete eine Laufflächenbreite von gerade einmal 10 Zentimetern – kaum breiter als der Reifen eines serienmäßigen Kleinwagens oder Motorrads. Die Hinterreifen hingegen entsprachen mit 31/62-15 dem Standard von LMP-Prototypen.
Gewichtsverteilung und Bremsdynamik: Warum das Konzept funktionierte
Die größte Sorge der Kritiker betraf das Kurvenverhalten. Ein Auto mit einer extrem schmalen Spur an der Vorderachse müsste rein theoretisch über die Vorderräder schieben (Untersteuern). Der DeltaWing umging dieses Problem durch seine extreme Hecklastigkeit.
Da fast drei Viertel des Gewichts auf den breiten Hinterrädern lagen, fungierte das Heck als massiver Drehpunkt. Die leichten Vorderräder mussten beim Einlenken kaum Masse bewegen. Sie dienten primär dazu, die Richtung vorzugeben, während die immensen Seitenführungskräfte fast vollständig von der breiten Hinterachse abgestützt wurden.
Beim Bremsen zeigte sich ein ähnliches Phänomen. Da der Schwerpunkt so weit hinten lag, kam es beim Verzögern kaum zu der sonst üblichen radikalen dynamischen Achslastverschiebung nach vorne. Die Hinterräder konnten einen monumentalen Teil der Bremsarbeit übernehmen, ohne dass die Gefahr bestand, dass die Hinterachse blockierte oder ausbrach. Dadurch reichten an der Vorderachse winzige, extrem leichte Bremsscheiben und -sättel aus, was wiederum die Ungefederte Masse massiv reduzierte.
Aerodynamik: Die Eliminierung des induzierten Widerstands
Traditionelle Sportwagen generieren Anpressdruck (Abtrieb) primär über große, tief stehende Frontflügel und monumentale Heckflügel. Diese Flügel erzeugen jedoch durch die Wirbelbildung an ihren Außenkanten einen erheblichen induzierten Luftwiderstand.
Der DeltaWing verzichtete in seiner Ur-Form komplett auf konventionelle Flügel. Die gesamte Oberseite des Fahrzeugs war wie die Tragfläche eines Flugzeugs geformt, jedoch mit umgekehrtem Profil, um Abtrieb statt Auftrieb zu erzeugen. Der Hauptteil des Anpressdrucks wurde jedoch durch den Venturi-Effekt des Unterbodens generiert. Zwei gigantische dreidimensionale Tunnel erstreckten sich entlang des Chassis bis zum Heckdiffusor. Da das Auto an der Front so schmal war, strömte die Luft völlig ungehindert unter und um das Fahrzeug herum, was zu einem historisch niedrigen Luftwiderstandsbeiwert führte.
Der RML-Motor: Effizienz in Zahlen
Für den Antrieb spannte das Konsortium mit der britischen Engineering-Schmiede Ray Mallock Ltd. (RML) zusammen. Entgegen den damaligen Marketingbehauptungen von Nissan handelte es sich bei dem Aggregat nicht um einen modifizierten Serienmotor aus dem Nissan Juke, sondern um eine reinrassige Rennmotorenkonstruktion von RML.
- Typ: 1,6-Liter-Reihenvierzylinder mit Turbolader und Direkteinspritzung.
- Leistung: ca. 300 PS bei 7.450 min⁻¹.
- Gewicht: ca. 70 Kilogramm.
Mit einer Leistung von 300 PS war der DeltaWing nominell nur halb so stark wie die damaligen LMP1-Werksprototypen von Audi und Toyota (die rund 600 PS leisteten). Da der DeltaWing mit rund 575 kg (inklusive Kraftstoff und Fahrer) jedoch fast 400 kg leichter war als ein LMP1-Fahrzeug und über einen unschlagbar geringen Luftwiderstand verfügte, erreichte er auf den langen Geraden von Le Mans exakt dieselben Höchstgeschwindigkeiten von knapp 300 km/h.
3. Die Premiere: Le Mans 2012 und das bittere Aus
Das Medienecho und die Performance im Training
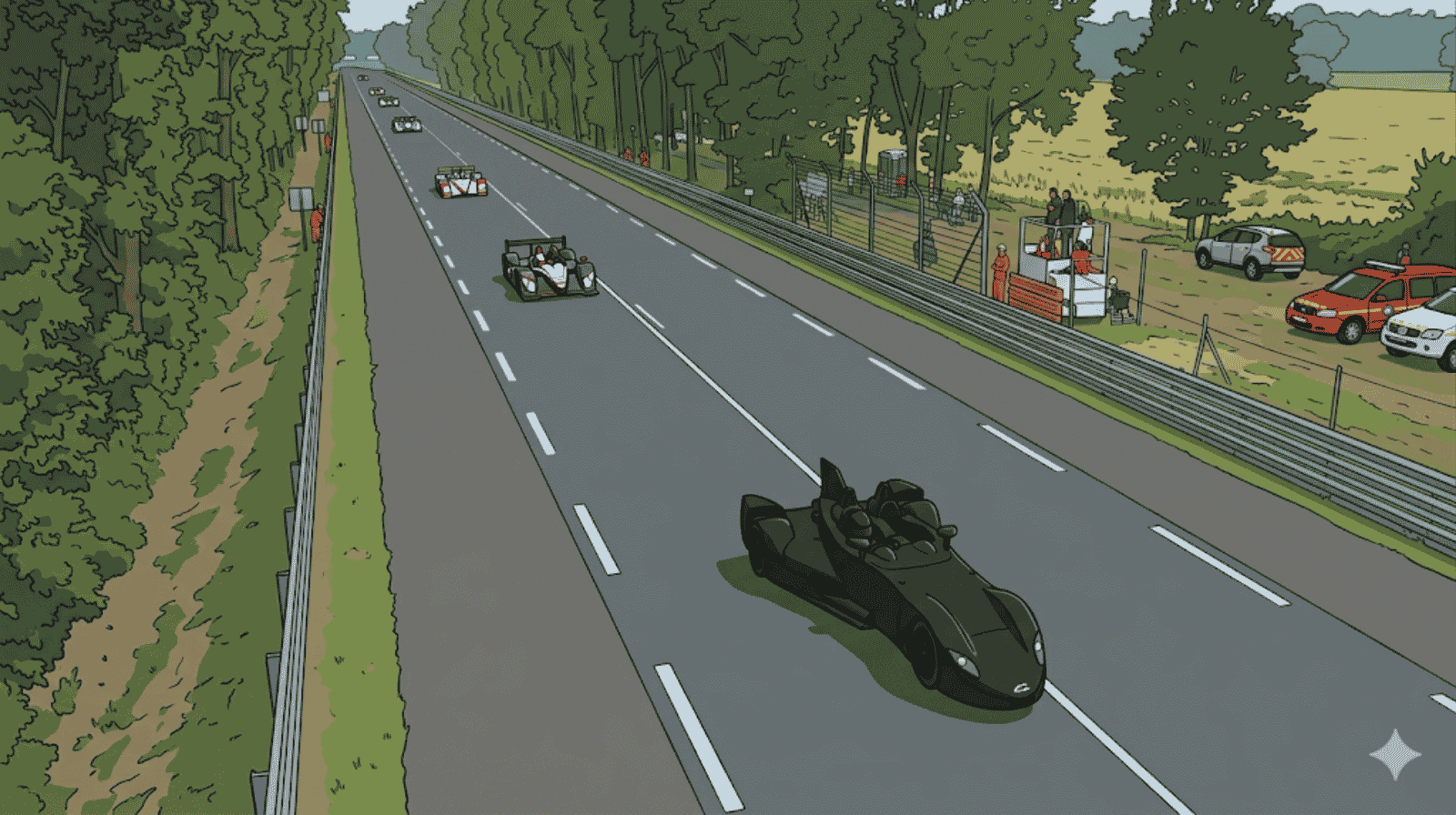
Als der mattschwarze DeltaWing im Juni 2012 in der Boxengasse von Le Mans auftauchte, war er die unbestrittene Sensation des Rennens. Das Fahrzeug polarisierte wie kein zweiter Rennwagen im 21. Jahrhundert. Die Fans tauften ihn ehrfürchtig „Batmobile“, während Puristen ihn als Marketing-Gag abtaten.
Doch bereits in den ersten freien Trainingssitzungen strafte das Auto seine Kritiker Lügen. Gefahren von Marino Franchitti, Michael Krumm und Satoshi Motoyama, spulte der DeltaWing konstante Rundenzeiten auf dem Niveau der schnellen LMP2-Kategorie ab. Das Auto fuhr Zeiten im Bereich von 3:42.6 Minuten. Viel beeindruckender war jedoch die Effizienz: Der Reifenverschleiß war so gering, dass Michelin prognostizierte, das Auto könne mehrere Stints (über 300 Kilometer) mit nur einem Satz der schmalen Vorderreifen absolvieren. Der Kraftstoffverbrauch lag exakt bei der anvisierten Hälfte eines LMP1-Boliden.
Die Tragödie in den Porsche-Kurven: Satoshi Motoyama und Kazuki Nakajima
Das mit Spannung erwartete Rennen am 16. Juni 2012 sollte jedoch ein jähes und unverschuldetes Ende finden. Der DeltaWing lief in der ersten Rennhälfte absolut zuverlässig und hielt sich schadlos aus allen Positionskämpfen heraus, da er ohnehin außerhalb der Wertung fuhr.
In der 75. Runde ereignete sich jedoch das Drama. Nach einer Safety-Car-Phase beschleunigte der japanische Werksfahrer Satoshi Motoyama den DeltaWing durch die ultraschnellen Porsche-Kurven. Direkt hinter ihm kämpfte der Werks-Toyota TS030 Hybrid mit Kazuki Nakajima am Steuer um Positionen. Nakajima unterschätzte die Linienführung des ungewöhnlich schmalen DeltaWing, touchierte ihn beim Überholmanöver seitlich am Heck und drückte ihn mit hoher Geschwindigkeit vehement in die Betonmauer.
Die Aufhängung und die Lenkung des DeltaWing wurden dabei schwer beschädigt. Was folgte, ging als einer der emotionalsten Momente in die Geschichte von Le Mans ein. Da die Regeln besagen, dass nur der Fahrer selbst Reparaturen am Auto durchführen darf, verbrachte Satoshi Motoyama über 90 Minuten verzweifelt am Streckenrand. Unterstützt durch Zurufe seiner Ingenieure, die hinter dem Sicherheitszaun standen, versuchte er mit Bordwerkzeug, die zertrümmerte vordere Lenkung notdürftig zu flicken, um das Auto zurück an die Box zu schleppen. Unter Tränen musste Motoyama schließlich aufgeben. Der DeltaWing war ausgeschieden, doch er hatte bewiesen, dass das Konzept funktionierte.
4. Das Zerwürfnis und der Technologietransfer zu Nissan
Der Bruch zwischen Don Panoz und Nissan
Trotz des Ausfalls in Le Mans war der DeltaWing ein phänomenaler PR-Erfolg für alle Beteiligten – insbesondere für Nissan. Der japanische Automobilkonzern hatte das Projekt im Jahr 2012 primär als Motorenlieferant und Hauptsponsor begleitet. Nach dem Saisonfinale 2012, bei dem der DeltaWing beim Petit Le Mans auf dem Road Atlanta Circuit einen sensationellen fünften Gesamtrang einfuhr, kam es hinter den Kulissen zum acrimonischen (bitteren) Bruch des Konsortiums.
Nissan wollte das revolutionäre Konzept für seine eigenen zukünftigen Marketing- und Elektrostrategien beanspruchen. Don Panoz und Ben Bowlby gerieten in einen heftigen Konflikt über die geistigen Eigentumsrechte und Urheberrechte des Designs. Bowlby wechselte schließlich komplett ins Lager von Nissan, um dort die Leitung neuer, radikaler Projekte zu übernehmen. Don Panoz behielt mit seiner Firma Élan Technologies die Rechte am DeltaWing-Namen und der ursprünglichen Chassis-Konstruktion. Dies markierte den Beginn eines erbitterten Rechtsstreits in den USA, der sich über mehrere Jahre hinziehen sollte.
Garage 56 (2014): Die Geburt des Nissan ZEOD RC
Nissan sicherte sich unter der Federführung von Ben Bowlby für das Jahr 2014 erneut den begehrten „Garage 56“-Startplatz für innovative Technologien. Das Ziel war nun noch radikaler: Das erste Rennfahrzeug zu konstruieren, das eine vollständige Runde auf dem 13,629 Kilometer langen Circuit de la Sarthe rein elektrisch und mit Renntempo absolvieren konnte.
Das Fahrzeug erhielt den Namen Nissan ZEOD RC (Zero Emission On Demand Racing Car). Optisch war der ZEOD RC eine unverkennbare Evolution von Bowlbys DeltaWing-Konzept. Der größte aerodynamische Unterschied lag in der Umwandlung von einem offenen Cockpit zu einem geschlossenen Coupé-Design. Dadurch konnte der Luftwiderstand nochmals signifikant gesenkt werden, um die begrenzten Energieressourcen der Batterien optimal zu nutzen.
5. Deep Dive: Der Nissan ZEOD RC
Das Antriebskonzept: Ein hochkomplexes Hybrid-System
Der Nissan ZEOD RC war kein reines Elektroauto (EV), sondern ein extrem komplexes, maßgeschneidertes Hybrid-Fahrzeug. Die technologische Herausforderung bestand darin, zwei völlig unterschiedliche Antriebsstränge in dem extrem engen, deltaförmigen Heck des Chassis unterzubringen.
Das System basierte auf dem Prinzip „Zero Emission on Demand“. Der Fahrer konnte per Knopfdruck im Cockpit manuell zwischen dem Verbrennungsmotor und dem reinen Elektroantrieb wechseln.
Nissan ZEOD RC
Antriebsstruktur & Drehmomentfluss
Nissan ZEOD RC Chassis
|
Elektro-Antrieb
|
Verbrennungsmotor
|
Bespoke 5-Gang Hewland Getriebe
Der Nissan DIG-T R: 40 Kilogramm, 400 PS
Wenn der ZEOD RC im Verbrennungsmodus lief, wurde er von einem der faszinierendsten Motoren der modernen Motorsportgeschichte angetrieben: dem Nissan DIG-T R.
- Konstruktion: Entworfen und gebaut wurde das Aggregat in Zusammenarbeit mit RML. Es handelte sich um einen winzigen 1,5-Liter-Dreizylinder-Turbomotor.
- Abmessungen: Der Motor war lediglich 500 mm hoch, 400 mm lang und 200 mm breit – er war so kompakt, dass er rein theoretisch in das Handgepäck eines Linienflugzeugs gepasst hätte.
- Leistungsgewicht: Bei einem Eigengewicht von sagenhaften 40 Kilogramm produzierte der Motor atemberaubende 400 PS bei 7.200 min⁻¹ und ein Drehmoment von 380 Nm.
- Besonderheit: Um maximal Gewicht einzusparen, wurden der Zylinderkopf und der Motorblock als ein einziges, zusammenhängendes Gussstück gefertigt. Damit übertraf der Motor das Leistungsgewicht damaliger Formel-1-Motoren.
Der Elektroantrieb und das Batterie-Drama
Für den elektrischen Part des „On Demand“-Konzepts war der ZEOD RC mit zwei 110 kW starken Elektromotoren ausgestattet. Diese leisteten kombiniert rund 300 PS.
Das kritische Element war die Batterie. Es handelte sich um ein maßgeschneidertes Lithium-Ionen-Akkupack mit einem Gewicht von ca. 150 kg, bestehend aus 672 Zellen und über 2.800 elektrischen Verbindungen. Die thermischen und elektrischen Anforderungen an diese Batterie waren astronomisch hoch:
- Lade-Zyklus: Während eines normalen 11-Runden-Stints mit dem Verbrennungsmotor musste die Batterie durch brutale Rekuperation beim Bremsen innerhalb von nur ca. 45 Minuten von 10 % auf 100 % aufgeladen werden.
- Entlade-Zyklus: Bei der reinen Elektrorunde musste die Batterie ihre gesamte Energie innerhalb einer einzigen, extremen 4-Minuten-Runde vollständig abgeben, um die immensen Geschwindigkeiten auf den Geraden aufrechterhalten zu können.
Das Kühlsystem des ZEOD RC musste dafür komplett zweigeteilt werden. Große aerodynamische Kühltunnel über den Hinterrädern leiteten die Luft auf der einen Seite zum Ladeluftkühler und zur Motorkühlung, während die andere Fahrzeugseite exklusiv für die Kühlung der Leistungselektronik und der Batterie reserviert war.
Ein schwerer logistischer Rückschlag ereignete sich unmittelbar vor der Rennwoche 2014. Das hochentwickelte, finale Renn-Batteriepack, das über eine verbesserte Zellverbindung und optimierte Kühlkanäle verfügte, wurde vom französischen Zoll aufgehalten und nicht rechtzeitig freigegeben. Nissan war gezwungen, das gesamte Rennwochenende mit einer schwereren, thermisch anfälligeren Test-Batterie zu bestreiten. Dies zwang die Ingenieure dazu, die Leistungsentfaltung (Deployment Maps) drastisch zu drosseln, um ein Überhitzen der Zellen zu verhindern.
6. Das Le-Mans-Wochenende 2014: Triumph und Blamage im Minutentakt
Der historische Meilenstein: 300 km/h ohne Abgase
Trotz der Batterieprobleme und einer sehr geringen Anzahl an Testläufen im freien Training (das Auto schaffte am Testtag nur wenige Runden, während die Konkurrenz von Audi über 50 Runden absolvierte), gelang Nissan im morgendlichen Warm-up am Samstag, dem 14. Juni 2014, ein historischer Triumph.
Gesteuert vom britischen GT-Akademie-Absolventen Wolfgang Reip, schaltete der ZEOD RC im Bereich der Mulsanne-Geraden in den reinen Elektromodus. Der weiße Prototyp schoss lautlos und ausschließlich von Batteriekraft angetrieben mit exakt 300 km/h über die Gerade. Wenig später vollendete das Fahrzeug die erste historisch dokumentierte, reine Elektro-Runde in Le Mans mit einer Rundenzeit von 4:22 Minuten. Damit wurden die Vorgaben des ACO (schneller zu sein als die GT-Fahrzeuge) zwar knapp verfehlt, doch der technologische Machbarkeitsnachweis war erbracht.
Das 23-Minuten-Drama: Chronologie des kolossalen Getriebeschadens
Der historische Triumph sollte jedoch binnen weniger Stunden in einer motorsportlichen Farce münden. Um 15:00 Uhr wurde das Rennen gestartet. Wolfgang Reip fuhr den Startstint und konnte sich problemlos im Mittelfeld behaupten. Doch bereits nach fünf Runden und einer Fahrzeit von gerade einmal 23 Minuten rollte der Nissan ZEOD RC antriebslos aus.
| Zeit / Runde | Ereignis | Technische Ursache / Details |
|---|---|---|
| 15:00 Uhr | Start Start des Rennens | ZEOD RC startet im Hybrid-Modus, platziert sich auf Rang 26. |
| Runde 3 | Warnung Erste Unregelmäßigkeiten | Telemetrie meldet Vibrationsspitzen im Heckbereich. |
| Runde 5 15:23 Uhr |
Ausfall Totaler Vortriebsverlust | Wolfgang Reip strandet eingangs der Indianapolis-Kurve. |
| 15:35 Uhr | K.O. Offizielles Rennaus | Das Fahrzeug kann nicht an die Box zurückkehren. Aufgabe des Teams. |
Die anschließende technische Analyse legte ein fundamentales Konstruktionsproblem offen. Nicht die hochkomplexe Batterie oder der hochgezüchtete Dreizylindermotor waren ausgefallen, sondern ein mechanisches Bauteil der Kraftübertragung: das maßgeschneiderte, extrem kompakte 5-Gang-Renngetriebe des britischen Herstellers Hewland.
Das Getriebe war schlichtweg nicht in der Lage gewesen, die permanenten, abrupten Drehmomentspitzen beim Wechsel zwischen dem Verbrennungs- und dem Elektromotor mechanisch zu verkraften. Ein Zahnradbruch im Inneren des Gehäuses führte zum totalen Blockieren und anschließenden mechanischen Kollaps des Getriebes. Für Nissan endete das extrem teure Projekt in einem PR-Desaster. Der ZEOD RC wurde nie wieder bei einem offiziellen Rennen eingesetzt.
7. Der IMSA DeltaWing: Die Ära unter Don Panoz
Die Evolution zum DWC13 Coupe
Während Nissan in Europa mit dem ZEOD RC scheiterte, setzte der amerikanische Milliardär und Motorsport-Mäzen Don Panoz das ursprüngliche Projekt in den USA fort. Panoz war fest von der Konkurrenzfähigkeit des Konzepts überzeugt. Für die Saison 2013 entwickelte seine Firma Élan Technologies eine geschlossene Version des Ur-DeltaWing: den DeltaWing DWC13.
Der DWC13 brach radikal mit der Nissan-Historie. Da der japanische Hersteller alle Triebwerke abgezogen hatte, musste Élan Motorsports in Rekordzeit ein völlig neues Antriebskonzept auf die Beine stellen.
Technische Revolution in 81 Tagen: Der Élan-Mazda-Motor
Die Entwicklung des neuen DWC13-Motors gilt bis heute als ein Musterbeispiel für hocheffizientes Prototyping unter extremem Zeitdruck. Der verantwortliche Design-Ingenieur Christian „Skitter“ Yaeger stand vor der Aufgabe, innerhalb weniger Monate ein konkurrenzfähiges Triebwerk zu konstruieren.
Das Team entschied sich, einen bestehenden Vierzylinder-Zylinderkopf eines Mazda MZR-Motors als Basis zu verwenden. Der gesamte Motorblock und das Kurbelgehäuse wurden jedoch von Élan komplett neu konstruiert und In-House aus einem massiven Aluminium-Block (Billet) gefräst.
- Spezifikation: 1,9-Liter-Vierzylinder-Reihenmotor mit Turbolader und Direkteinspritzung.
- Leistung: ca. 350 PS.
Das absolute Highlight dieser Konstruktion war die Ansaugbrücke (Intake Manifold). Da konventionelle Fertigungsverfahren wie Gießen oder Fräsen aufgrund der extrem engen Platzverhältnisse im Chassis und der komplexen Geometrie der acht asymmetrischen Einlasskanäle zu lange gedauert hätten, kooperierte Élan mit dem US-amerikanischen 3D-Druck-Spezialisten CRP USA.
Die Rolle des 3D-Drucks: Windform SP im Härtetest
In einer Rekordzeit von nur 81 Tagen entstand aus den reinen CAD-Daten ein voll funktionsfähiger Rennmotor. Dies war nur möglich, weil die komplette Ansaugbrücke mittels additiver Fertigung im selektiven Lasersintern (SLS) dreidimensional gedruckt wurde.
Als Werkstoff kam das hochentwickelte Material Windform SP zum Einsatz. Dabei handelt es sich um ein kohlenstofffaserverstärktes Polyamid-Kompositmaterial. Die mechanischen Anforderungen an dieses gedruckte Kunststoffbauteil im Rennbetrieb waren extrem:
- Druckbelastung: Als Turbomotor lief das Aggregat unter permanentem, stark schwankendem Ladedruck (Boost). Die Ansaugbrücke musste diesen Druckwechseln sowie massiven Vibrationen und Schocks standhalten.
- Thermische Beständigkeit: Das Material wies eine extrem hohe Wärmeformbeständigkeit auf und widerstand den extremen Temperaturen im Motorraum ohne Deformation.
- Flüssigkeitsresistenz: Windform SP resorbierte keinerlei Kraftstoff- oder Ölrückstände, was für die strukturelle Integrität unerlässlich war.
Die Zuverlässigkeit dieser Technologie war bemerkenswert. Die im 3D-Druckverfahren hergestellten Ansaugbrücken absolvierten in den folgenden zwei Jahren über 12.000 Renn- und Testmeilen im IMSA-Sport sowie unzählige Stunden auf dem Motorenprüfstand (Dyno) ohne einen einzigen Materialfehler.
Aerodynamische Upgrades für amerikanische Rundkurse
Die amerikanischen Rennstrecken der IMSA-Serie (wie Sebring, Mid-Ohio oder Road America) unterscheiden sich grundlegend von den endlosen Geraden in Le Mans. Sie sind eng, winklig, extrem uneben (Bumpy) und erfordern deutlich mehr mechanischen und aerodynamischen Anpressdruck an der Vorderachse.
Élan Technologies musste das aerodynamische Konzept des DWC13 daher grundlegend modifizieren. Für engere Strecken entwickelte das Team ein spezielles High-Downforce-Kit:
- Der Frontflügel: An der extrem schmalen Nase wurden links und rechts winzige, filigrane Flügelstrukturen mit doppelten Endplatten angebracht. Dies brach zwar optisch mit der puristischen Ur-Idee Bowlbys, war jedoch unumgänglich, um das Untersteuern in engen Kehren zu eliminieren.
- Der Heckflügel: Im Heckbereich, im Raum zwischen den hinteren Radverkleidungen, wurde ein tief sitzender, konventioneller Flügel installiert, ergänzt durch einen markanten Gurney Flap auf dem modifizierten Heckdiffusor.
Auf schnellen Oval-Rundkursen wie dem Daytona International Speedway wurde der DWC13 hingegen in seiner „reinen“, flügellosen Konfiguration eingesetzt, um den Luftwiderstand zu minimieren.
8. Rennergebnisse und das endgültige Ende des DeltaWing
Die IMSA-Kampagnen (2014–2016)
Der IMSA DeltaWing DWC13, der meist in einer auffälligen, verchromten silbernen Lackierung antrat, entwickelte sich in den Händen von Weltklasse-Piloten wie Katherine Legge, Andy Meyrick, Sean Rayhall und dem Deutschen Andreas Wirth zu einem ernstzunehmenden Konkurrenten für die etablierten Daytona Prototypes (DP) und LMP2-Fahrzeuge.
Das große Problem des Autos blieb jedoch zeitlebens die Anfälligkeit bei Unfällen und die Tatsache, dass andere Fahrer das extrem schmale Fahrzeug im dichten Verkehr schlichtweg übersahen, da die Silhouette im Rückspiegel kaum wahrnehmbar war. Zudem zwangen reglementbedingte Kompromisse – wie das vom Veranstalter vorgeschriebene Anbringen von konventionellen Außenspiegeln statt der von Bowlby favorisierten Kamerasysteme – das Team dazu, einen erhöhten aerodynamischen Widerstand in Kauf zu nehmen.
Dennoch blitzte das enorme Potenzial des DWC13 immer wieder auf. Beim legendären Petit Le Mans 2014 führte das Auto das Rennen zeitweise sensationell an und verpasste das Podium als Vierter nur knapp.
Die Sternstunde und die Tragödie von Daytona 2016
Die absolute fahrerische und technische Sternstunde des IMSA DeltaWing schlug im Januar 2016 beim „Roar Before The 24“, dem offiziellen Vortest zu den 24 Stunden von Daytona. Bei wechselnden äußeren Bedingungen zeigte der DWC13 eine phänomenale Performance. Die britische Rennfahrerin Katherine Legge setzte am zweiten Testtag die absolute Bestzeit des gesamten Feldes, und Andy Meyrick beendete den Abschlusstag auf dem zweiten Rang. Das Auto schien reif für den ganz großen Erfolg.
Im eigentlichen 24-Stunden-Rennen von Daytona im Februar 2016 übernahm Katherine Legge in der Anfangsphase die Führung. Der silberne DeltaWing dominierte das Rennen und setzte sich mühelos von der versammelten Prototypen-Konkurrenz ab. Es sah nach einer motorsportlichen Sensation aus.
Nach knapp zwei Stunden folgte jedoch die Tragödie. Ein konkurrierendes Prototypen-Fahrzeug war nach einem Dreher mitten auf der schnellen Bergauf-Passage der Strecke gestrandet. Es herrschte Full-Course-Yellow, doch die Streckenposten hatten die Unfallstelle noch nicht ausreichend signalisiert. Der DeltaWing-Pilot Andy Meyrick schoss über die Kuppe und hatte aufgrund der extrem flachen und schmalen Sichtachse des DWC13 absolut keine Chance, dem querstehenden Fahrzeug auszuweichen. Der DeltaWing knallte ungebremst in das Wrack. Das Auto wurde komplett zerstört, Meyrick blieb zum Glück weitgehend unverletzt. Es war der moralische Todesstoß für das Projekt.
Das Reglement-Aus 2017: Die LMP2-Homologation
Das endgültige Ende des DeltaWing-Projekts wurde schließlich nicht auf der Rennstrecke, sondern am grünen Tisch besiegelt. Für die Saison 2017 beschlossen die weltweiten Motorsport-Dachverbände FIA, ACO und die amerikanische IMSA eine radikale Strukturierung der Prototypen-Klassen.
Es wurde ein neues LMP2-Reglement eingeführt, das vorschrieb, dass alle Prototypen zwingend von einem der vier lizenzierten Chassishersteller (Dallara, Oreca, Ligier oder Riley/Multimatic) stammen und einen standardisierten Gibson-V8-Einheitsmotor verwenden mussten.
Dieses streng reglementierte Homologationsfenster bot keinerlei Spielraum mehr für Freigeister oder abweichende Fahrzeugarchitekturen. Der DeltaWing DWC13 verlor mit dem 31. Dezember 2016 seine offizielle Startberechtigung im internationalen Spitzenmotorsport. Don Panoz zog das Team Ende 2016 endgültig zurück.
9. Analyse: Warum scheiterte die Revolution?
Aus technologischer und physikalischer Sicht war der DeltaWing kein Fehlschlag. Er erbrachte den unwiderlegbaren Beweis, dass das mathematische Dogma „Gewichtsreduktion schlägt Leistungssteigerung“ in Kombination mit extremer aerodynamischer Effizienz im Rennsport funktioniert. Dass das Konzept langfristig dennoch scheiterte und ein spektakulärer „Footnote“ der Motorsportgeschichte blieb, hat drei Kernursachen:
- Die Komplexität der Hybrid-Schnittstellen (Das ZEOD-Dilemma): Der Nissan ZEOD RC demonstrierte schmerzhaft, dass die mechanischen Komponenten der traditionellen Kraftübertragung (Getriebe, Differentiale) mit den transienten, digitalen Drehmomentbelastungen modernster Elektro-Verbrenner-Hybride im extremen Grenzbereich überfordert waren. Die Entwicklungszeit war schlichtweg zu kurz, um die mechanische Zuverlässigkeit für ein 24-Stunden-Rennen zu garantieren.
- Die fundamentale Unvereinbarkeit mit dem Motorsport-Geschäftsmodell: Moderner Motorsport finanziert sich über Kundensport (Customer Racing) und die Homogenität von Reglements (Balance of Performance). Ein Auto, das optisch und konstruktiv derart aus dem Rahmen fällt, lässt sich nicht in ein bestehendes Klassenraster pressen. Die etablierten Hersteller hatten kein Interesse daran, gegen ein Auto zu verlieren, das mit der Hälfte des Budgets und der Hälfte des Kraftstoffs dieselben Zeiten fuhr. Das Reglement eliminierte die Innovation, um den Status quo zu schützen.
- Mangelnder Technologietransfer in die Serie: Obwohl Nissan nach dem ZEOD RC mit dem Nissan BladeGlider ein spektakuläres, dreisitziges Straßenkonzept im Delta-Design vorstellte, schaffte die Architektur nie den Sprung in die Massenproduktion. Die breite Masse der Automobilkäufer verlangt nach traditionellen Fahrzeugproportionen, und die passive Crash-Sicherheit (insbesondere der Seitenaufprallschutz bei einer extrem schmalen Front) stellt den Serienautomobilbau vor immense, ökonomisch kaum darstellbare Herausforderungen.
10. Fazit und Vermächtnis
Der DeltaWing, der Nissan ZEOD RC und der IMSA DeltaWing DWC13 bleiben als eines der mutigsten, faszinierendsten und visuell spektakulärsten Kapitel des modernen Motorsports in Erinnerung. Sie waren das Produkt von Querdenkern wie Ben Bowlby und unerschrockenen Finanziers wie Don Gurney und Dr. Don Panoz, die bereit waren, Millionen zu investieren, um den physikalischen Gegenbeweis zu einer konservativen Industrie anzutreten.
Das Projekt hat bleibende Spuren hinterlassen. Die bahnbrechenden Erkenntnisse im Bereich der additiven Fertigung unter extremen Belastungen – wie die im 3D-Drucker hergestellte Windform-SP-Ansaugbrücke des Élan-Motors – gehören heute zum absoluten Standard in der Formel 1 und der Luft- und Raumfahrtindustrie.
Auch wenn der ZEOD RC nur 23 Minuten im Rennen überlebte und der DWC13 durch ein bürokratisches Reglement gestoppt wurde: Die lautlose, rein elektrische 300-km/h-Runde des ZEOD RC durch die Nacht von Le Mans bleibt ein unvergesslicher Meilenstein auf dem Weg zur Elektrifizierung des Hochleistungssports. Der DeltaWing war ein Blick in eine alternative Zukunft des Automobilbaus – eine pfeilschnelle, hocheffiziente Anomalie, die bewies, dass die radikalsten Ideen manchmal die faszinierendsten sind.
Technische Daten im direkten Vergleich
DeltaWing-Konzepte und Evolutionsstufen in der Übersicht
| Parameter | Nissan DeltaWing (Le Mans 2012) |
Nissan ZEOD RC (Le Mans 2014) |
IMSA DeltaWing DWC13 (Coupe 2016) |
|---|---|---|---|
| Cockpit-Typ | Offen (Open Top) | Geschlossen (Closed Coupe) | Geschlossen (Closed Coupe) |
| Chassis-Basis | Modifiziertes Aston Martin AMR-One | Adess/CLM Carbon Monocoque | Élan Technologies Carbon Monocoque |
| Gewicht (trocken) | 575 kg | ca. 700 kg | ca. 610 kg |
| Hauptantrieb | 1.6L 4-Zylinder Turbo (RML) | 1.5L 3-Zylinder Turbo (Nissan DIG-T R) | 1.9L 4-Zylinder Turbo (Élan-Mazda) |
| Verbrenner-Leistung | 300 PS | 400 PS | 350 PS |
| Elektro-Antrieb | Nein | Ja 2x 110 kW Elektromotoren | Nein |
| Besonderheit | Michelin 10-Zentimeter-Vorderreifen | 3D-gedruckte Windform SP Ansaugbrücke | High-Downforce Aero-Kit (Flügel) |
| Beste Rundenzeit Le Mans | 3:42.6 min (LMP2-Niveau) |
4:22.0 min (Rein elektrisch) |
Nicht angetreten (nur in den USA aktiv) |
| Max. erreichte Vmax | 298 km/h | 311,8 km/h (Hybrid) 300,0 km/h (EV) |
305 km/h (Daytona Oval) |